Kickoff
We learned about our clients product vision, strategy, and business model.
Initial proof of concept
Our engineers built a working proof of concept confirming the feasibility of snap-drag 3D modeling in the browser and the accuracy of kinematics simulation.
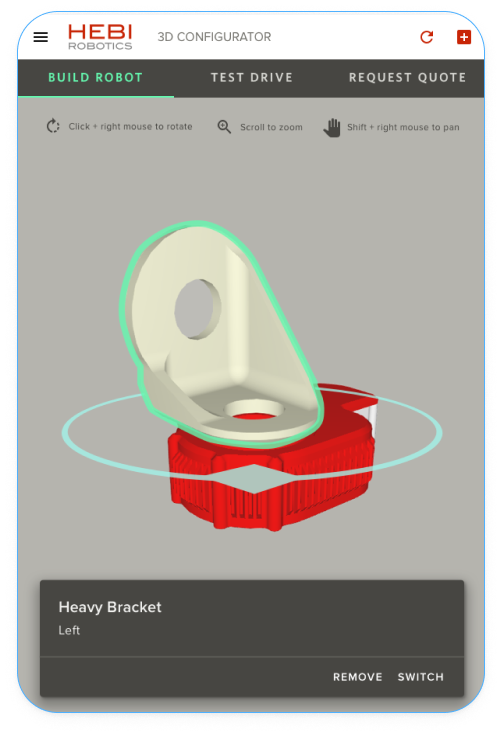
Early design exploration
Having proven feasibility, the team went to work to sketch out early workflows for assembling robots from an online parts catalog and testing them online. We also focused on visual style and brand considerations.
Release planning
We collaborated with our client to define what must be present in the initial release in terms of foundations, core requirements, and feature functionality.
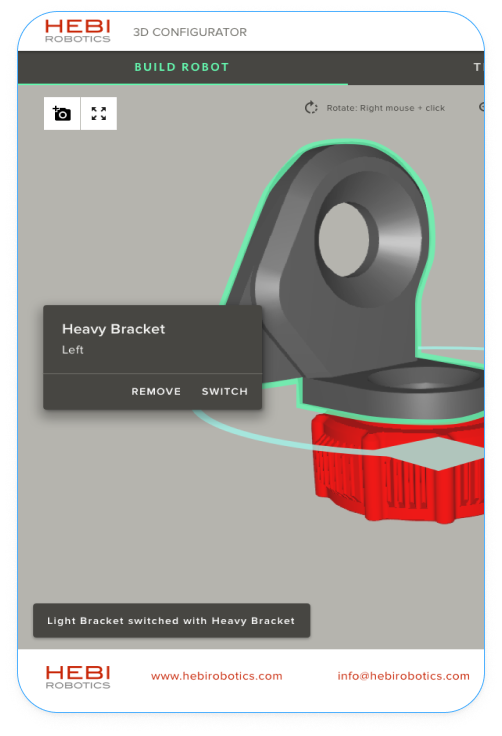
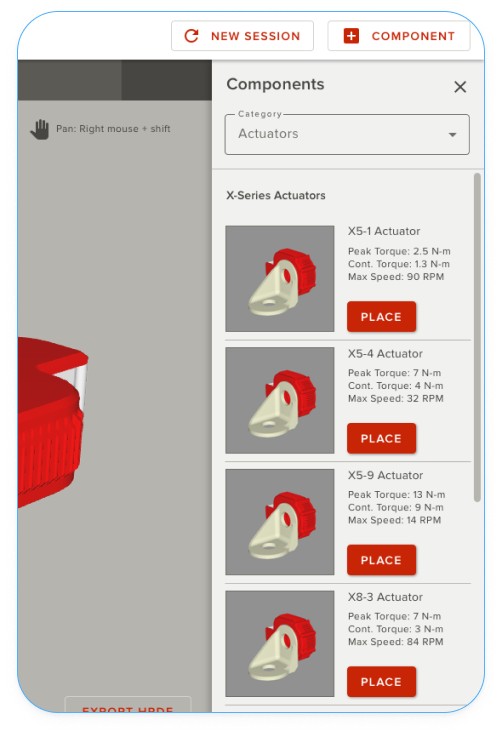
Software architecture and strategy
Our architect and engineers resolved complexities around uploading and storing CAD models and rendering in the browser interface, building the online catalog of 3D models and customizing each part for simulation.
Connecting to sales workflow
The engineers wrote code to extract the parts list from the customers’ designs and format it for submission to the sales team. The customer’s contact information and notes could be sent to a sales associate for quoting.
Build, build, build!
We designed, coded, and tested on a weekly basis until we were feature complete for the first release. Progress was demoed on a bi-weekly basis.
Prepare for launch
Once the app was complete and QA tested, we assisted our client in deploying the app on their servers so they could take over maintenance at that point.
Release planning
We collaborated with our client to build a backlog and plan the build of the software in a way that met the key milestones needed to get to market.
Build, build, build!
We designed, coded, and tested on a weekly basis until we were feature complete for the first release.
Prepare for launch
Once the app was complete and fully QA tested, we assisted our client in deploying the software on their production servers. The launch was a success and we helped transition their code and all production assets to their internal team.